|
Jorge Marques e Ruben Monteiro
realizaram uma simulação em maqueta, tendo como finalidade o
controlo automático por sensores de uma ponte levadiça, com
semáforos para controlo de trânsito. O seu princípio de
funcionamento é: quando um navio é detectado (por um dos sensores),
activa um mecanismo fazendo levantar o tabuleiro da ponte e cortando
a passagem do trânsito, no mesmo tabuleiro, através da semaforização.
Após ser novamente detectado aquando da sua passagem pelo segundo
sensor, activa o mecanismo de descida do tabuleiro da ponte, dando
também assim permissão ao trânsito para reentrar em circulação
normal, até que seja detectada uma nova embarcação. Este trabalho
visa regular tráfego marítimo e terrestre, podendo ser utilizado em
lugares com essas características.
Ângelo Oliveira e Tiago Cravo
apresentaram uma maqueta para um circuito de captação, circulação e
recuperação de água. O princípio de funcionamento deste dispositivo
baseia-se em bombear água de um recipiente para um reservatório, que
quando atinge o seu limite de nível, activará um sensor que irá
parar a bombagem de água. Esse mesmo sensor dará ordem de abertura a
uma electro-válvula para esvaziamento do reservatório. À medida que
o reservatório se encontra a esvaziar a água para um segundo
recipiente (este acoplado a uma passadeira rolante), leva também o
sensor até à sua posição inicial, que mal seja atingida, fecha a
electro-válvula e põe a passadeira em andamento, levando assim o
segundo recipiente a despejar a água no recipiente inicial. Este
processo reactiva-se sempre que tudo esteja novamente no seu estado
inicial, após a paragem (auxiliada por um fim de curso no final da
passadeira), comandado por um contacto auxiliar temporizado. Este
circuito poderá ser utilizado por fábricas, empresas de reciclagem
de água, e possivelmente num futuro próximo, para produção de
hidrogénio através da electrólise da água.
Pedro Simões e Daniela Caldeira
construíram uma maqueta com semáforos inteligentes. Esta contém
equipamentos tais como sensores, controlos de velocidade,
semaforização e software apropriado, para o efeito. Para isso foram
utilizados autómatos programáveis com programas adequados e vários
componentes electrónicos, passivos e activos. A maqueta é
constituída por um cruzamento que dispõe de uma via principal, e
outra secundária, sendo esta atravessada por uma via-férrea. É
dotado de um semáforo na via principal, continuamente ligado
(verde), com controlo de velocidade. A outra via é controlada por
sensores de presença que activam os semáforos.
As passadeiras da via principal possuem dois botões de comando que
possibilitam a travessia de peões. Todo o sistema tem protecção,
conforme as exigências, para segurança de peões e veículos. O
comboio tem o seu próprio sistema de semaforização, que o obriga a
parar devido a eventuais obstáculos na linha, complementado com um
controlo de abertura e fecho de cancelas. Todo este sistema é
acompanhado por instruções que explicitam toda a sua complexidade e
funcionalidade. A finalidade deste trabalho é criar um sistema mais
seguro para peões e condutores, e poupança de tempo nas filas de
espera.
Jorge Quitério e Alberto Sousa
recriaram uma linha de montagem para transporte e manuseamento de
cargas. É constituída por contactores, contactos auxiliares
temporizados, e fins de curso com o objectivo de limitar o
movimento, tanto do vagão, como do monta-cargas, que é realizado por
dois motores monofásicos de corrente contínua, alimentados com
tensão reduzida. O seu funcionamento é activado através de uma
betoneira, que contem três botões: um de arranque normal que coloca
o vagão em movimento no sentido do monta-cargas; o segundo é de
paragem normal e o terceiro faz mover o vagão no sentido oposto. O
circuito tem também um botão de emergência que desliga totalmente
todo o processo, caso ocorra algum acidente de trabalho ou outra
anomalia. Todo o circuito está automatizado e é autónomo. Consiste
no movimento em vaivém do vagão, assistido pelo monta-cargas. Todo
este processo de transporte, elevação e despejo de material é
comandado por um complexo sistema de automatismos industriais,
sequenciais e a relés.
Paulo Costa e Bruno Coutinho
projectaram uma cidade automatizada, que contém uma ponte levadiça,
comandada ma-nualmente, mas com um sistema de semaforização e outro
sonoro para controlo do tráfego; um teleférico, que atravessa toda a
maqueta, para aplicação do controlo de marcha; a iluminação para uma
via-férrea de uma passagem de nível “sem guarda” com um comboio
semi-automati-zado, equipado com sensores para activarem a cancela,
provocada pela aproximação do comboio; e, finalmente, uma
mini-central de produção de energia eléctrica, que funciona com ar
comprimido, capaz de produzir 16V, em corrente alternada, com
25bar/300psi de pressão.
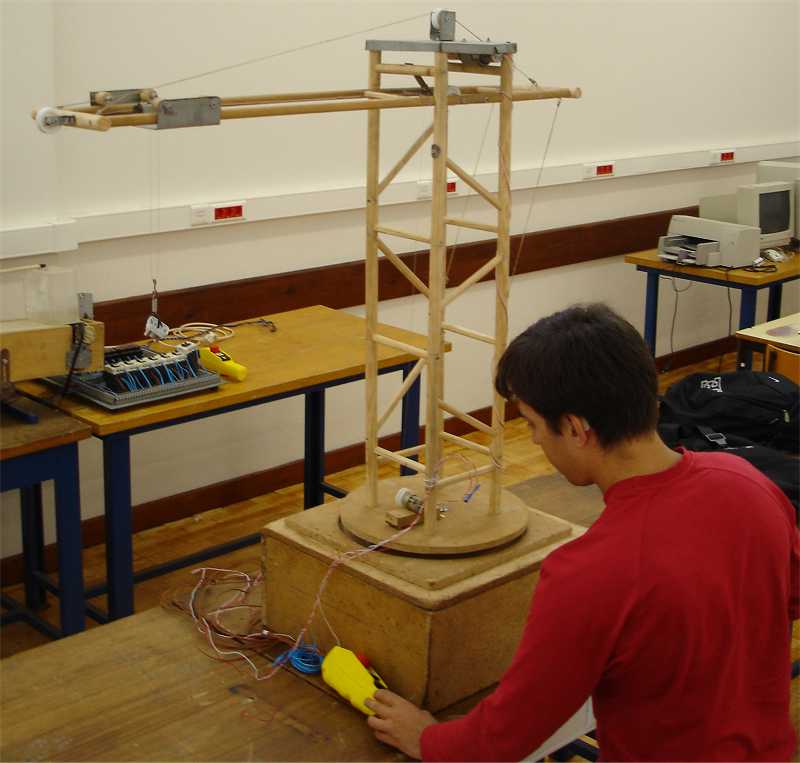
André Gonçalves apresentou um
modelo de grua utilizada para movimentar cargas. É composta por um
mastro/torre vertical e uma lança que se posiciona e move na
horizontal. O conjunto gancho/cabo é o responsável pela elevação das
cargas. O operador da grua pode controlá-la directamente ou à
distância, através de uma betoneira que lhe dará ordem para subir e
descer a lança, subir e descer o gancho e rodar a lança para a
esquerda e para a direita, em torno de um eixo vertical. Os
movimentos são executados através de três motores eléctricos
monofásicos de 230, 24 e 12V de potência.
n |